CarrierBot
Project Title
An Autonomous Mobile Robot (AMR) for Intra-office Transport with an Intuitive Teach-and-Repeat Programming
Goal
- Development of a cost-effective mobile robot plattform for transport tasks in daily life.
- Development of a intuitive teach-and-repeat programming interface so that people without technical expertise can easily reprogramm the robot
- Identification and implementation of AI-based methods for Teach-In Programming of robot's path
Application
The robots should be usable in many areas of daily life, e.g. office, household and care.
Research Topic
To address the shortage of skilled workforce, especially in care professions, an increase in the efficiency of existing personnel is needed. Transporting goods and working materials from one place to another is an integral part of the work in many offices or clinics. These tasks are often recurrent and still require the attention and time of the staff. Low-cost and flexibly adaptable mobile robots executing the recurrent relocation of goods would be highly beneficial.
State of the Art
Currently, Autonomous Mobile Robots (AMR) are primarily used in a more standardized environment, such as industrial production, warehouse management, and logistics, which are typically characterized by a regular topology or standardized repetitive robot movements. In these applications, advanced simultaneous localization and mapping algorithms (SLAM) and path planning algorithms can already address this problem sufficiently. However, non-standardized tasks and complex environments must be considered to use mobile robots in daily scenarios.
Drawbacks of the State of the Art
Commonly used control strategies usually lack a simple user interface. Reprogramming the robot may require technical and coding knowledge, which is often an obstacle to use for people without technical expertise. In commercially available mobile service robots, end-user programming usually works by setting points or paths in a mapping software. These robots' localization and navigation systems rely on SLAM or visual SLAM.Collecting the mapping data is time-consuming and the systems cannot easily be transferred to new operating environments. As service robots are supposed to work alongside humans, natural and intuitive programming methods are required.
Concept
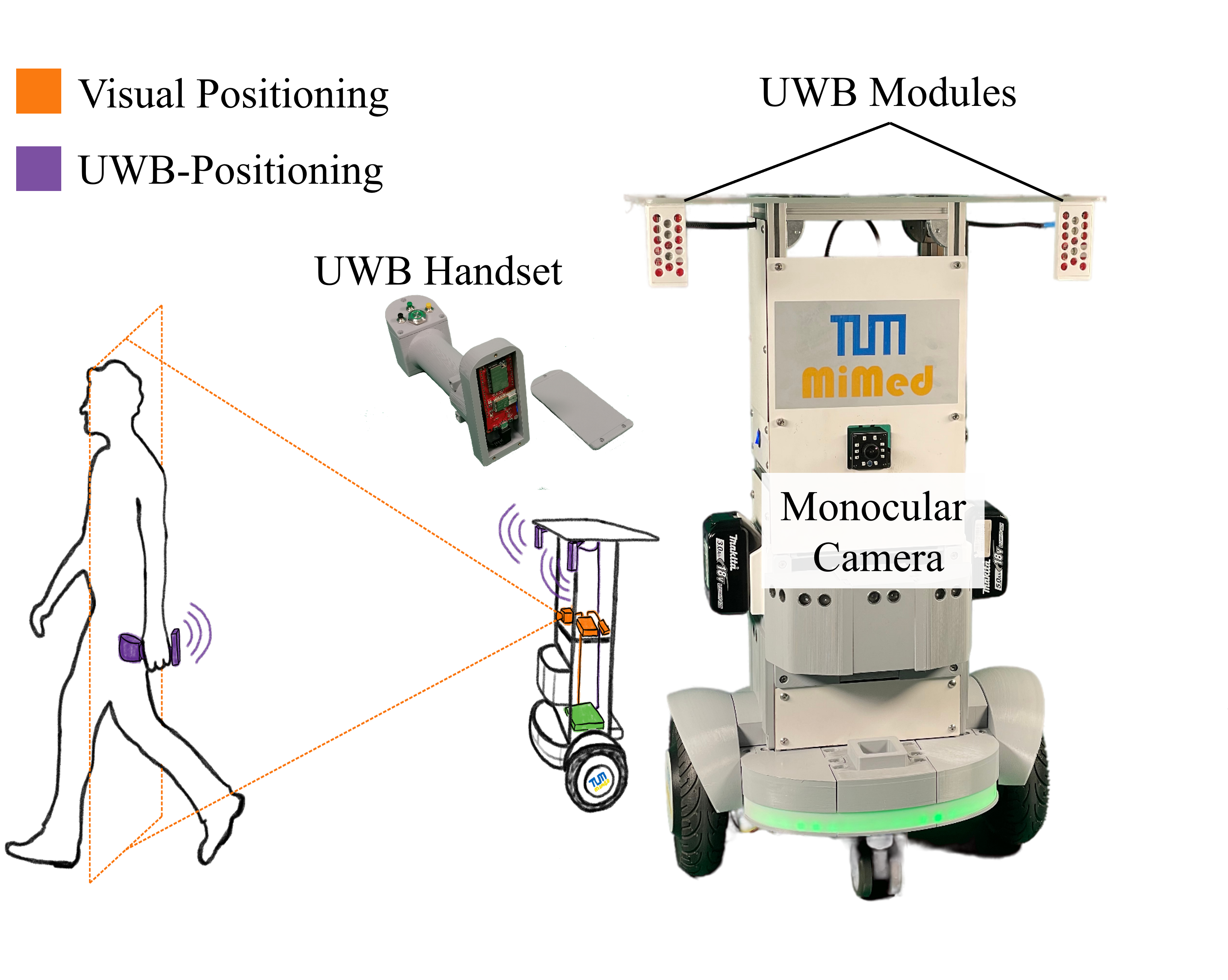
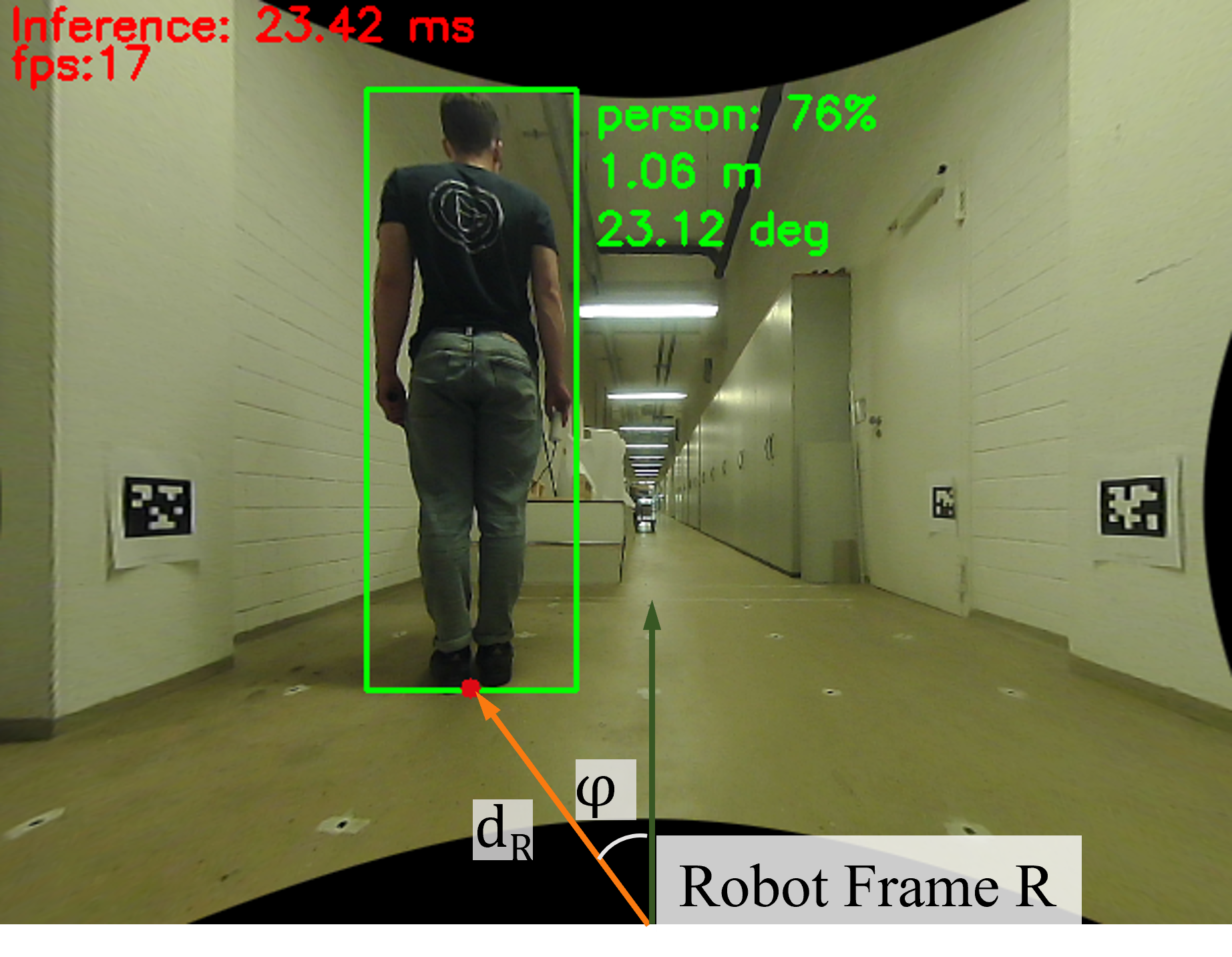
- Automatic human following as a path programming interface using Ultra-Wideband (UWB) sensors and AI-based computer vision data fusion
- Mapless collision avoidance using ultrasonic sensors and real-time AI-based vision data
- Graph-based SLAM using artificial landmarks (AprilTags) for large-distance path storage and localization
Publication and award

Zhang, D.; Birner, L.; Pancheri F.; Rehekampff, C.; Lueth, T. C. (2024): A Hybrid Human Tracking System using UWB Sensors and Monocular Visual Data Fusion for Human Following Robots, 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024, accepted)
Zhang, D.; Birner, L.; Zinkernagel, V.; Rehekampff, C.; Burschka, D.; Lueth, T. C. (2023): Carrier Bot: A UWB-Based Human Following Mobile Platform for Intra-Office Transport with an Intuitive Teach-And-Repeat Programming. IEEE International Conference on Robotics and Biomimetics (ROBIO 2023), December 4-9, 2023, Koh Samui, Thailand. doi: 10.1109/ROBIO58561.2023.10354960 (IEEE ROBIO Robotica Best Paper Award Finalist)