RoLei - Roboterbasiertes Verlegen deformierbarer Leitungen
Das Verlegen von Leitungen ist ein wesentlicher Schritt der Montage zahlreicher Produkte. Beispiele hierfür sind Hydraulik- und Pneumatiksysteme von Landmaschinen oder Hochvoltspeichersysteme von Elektrofahrzeugen. Dieser Prozess umfasst unter anderem das gezielte Deformieren der Leitungen, das Fixieren an definierten Punkten und das Kontaktieren der Leitungsenden mittels Steckverbindungen.
Derzeit wird das Verlegen von Leitungen überwiegend manuell durchgeführt, was zu zwei Herausforderungen führt: Zum einen treten Qualitätsprobleme, beispielsweise in Form fehlerhaft verlegter Leitungen oder Scheinverrastungen, auf. Zum anderen ist die körperliche Belastung der Mitarbeitenden durch die erschwerte Zugänglichkeit, ungünstige Körperhaltungen, hohe Monotonie und filigranen Tätigkeiten hoch. Insbesondere in Zeiten des Fachkräftemangels ist dies für den Hochlohnstandort Deutschland problematisch.
Die Automatisierung des Leitungsverlegens bietet das Potenzial, diesen Herausforderungen zu begegnen sowie die Effizienz und Qualität des Montageprozesses zu steigern. Mit dem Stand der Technik ist es zum aktuellen Zeitpunkt jedoch nur beschränkt möglich, Robotersysteme für die automatisierte Ausführung dieser Tätigkeit einzusetzen.
Zielsetzung
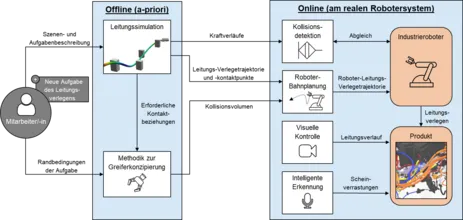
Das übergeordnete Ziel des Projekts RoLei ist es, ein Robotersystem zu befähigen, deformierbare Leitungen automatisiert zu verlegen. Dies soll durch die Kombination von Trajektorienplanung eines Industrieroboters mit einer Leitungs-Physiksimulation erreicht werden. Dafür werden aus der Physiksimulation der Leitung aufgabenbezogene Trajektorien sowie notwendige Kontaktpunkte des Roboters mit der Leitung abgeleitet. Anhand der Kontaktpunkte werden geeignete Greifersysteme für die Handhabung der Leitung ausgelegt. Auf Basis der Leitungstrajektorien sowie der Kontaktpunkte mit der Leitung werden anschließend die Robotertrajektorien geplant. Um die Abweichungen zwischen Simulation und Realität bei der Implementierung der Trajektorien zu kompensieren wird intelligente Sensorik eingesetzt, die auch zur Qualitätssicherung der verlegten Leitung verwendet wird.
Forschungsschwerpunkte
- Greiftechnik: Entwicklung einer Methodik zur Konzipierung von Greifersystemen für das Verlegen deformierbarer Leitungen
- Einsatz von Simulationen zur digitalen Planung des Leitungsverlegens: : Kombinierte Betrachtung der Robotertrajektorienplanung und einer Leitungs-Physiksimulation, um optimale Verlegetrajektorien und Kontaktpunkte zwischen Roboter und Leitung zu bestimmen
- Durchführen des Leitungsverlegens durch Simulationseinsatz
- Fehlererkennung im Leitungsverlegeprozess unter Einsatz intelligenter Sensorik
Konsortium
Das Konsortium setzt sich aus dem Institut für Werkzeugmaschinen und Betriebswissenschaften (iwb) der TU München drei Unternehmen (AGCO GmbH, F. X. MEILLER Fahrzeug- und Maschinenfabrik GmbH & Co KG, fleXstructures GmbH) und einem assoziierten Partner (BMW Group) zusammen.
Danksagung
Das Projekt RoLei wird durch das Bayerische Staatsministerium für Wirtschaft, Landesentwicklung und Energie gefördert und durch den Projektträger VDI/VDE Innovation + Technik GmbH administrativ betreut. Das iwb bedankt sich herzlich bei allen Partnern für die Förderung, die Unterstützung und die gute Zusammenarbeit im Projekt.
| Laufzeit | 01.07.2024 - 30.06.2027 |
| Förderer | Bayerisches Staatsministerium für Wirtschaft, Landesentwicklung und Energie |