FSofSG(TR,alpha)- Features surfaces of SG |
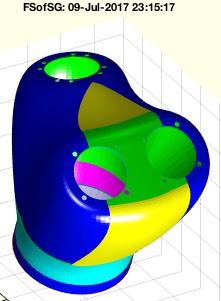 |
% FSofSG(TR,alpha) - Features surfaces of SG % (by Tim Lueth, VLFL-Lib, 2017-JUL-09 as class: SURFACES) % % This fnctn can take several seconds to classify all OPEN surfaces of a % solid by using TR3neighborsAngle and neighborsAngleSurface. % When called without output parameter; drawing the surfaces take the % most time. % SGsurfaces returns CLOSED surfaces (Status of: 2017-07-09) % % Introduced first in SolidGeometry 4.0 % % See also: surfacesofSG % % FIL=FSofSG(TR,[alpha]) % === INPUT PARAMETERS === % TR: Solid Geometry or Triangulation % alpha: maximum angle difference between two facets; default is 1 ~ 60 % degree % === OUTPUT RESULTS ====== % FIL: Index List for the Surface Indices % % EXAMPLE: % load JACO_robot.mat % surfacesofSG(JC3); % % See also: surfacesofSG % |
VLmeshgrid(xx,yy,zz)- simple function for a better understand of meshgrid |
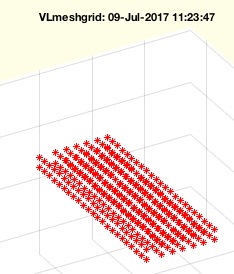 |
% VLmeshgrid(xx,yy,zz) - simple fnctn for a better understand of meshgrid % (by Tim Lueth, VLFL-Lib, 2017-JUL-09 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.0 % % See also: CPLofmeshgrid(X, Y), PLmeshgrid % % VL=VLmeshgrid(xx,yy,[zz]) % === INPUT PARAMETERS === % xx: list of x values % yy: list of y values % zz: list of y values; % === OUTPUT RESULTS ====== % VL: Point list of all mesh coordinates % % EXAMPLE: % VLmeshgrid(1:3,1:2,10) % VLmeshgrid([0 15 25 35 45 55 65],0:8:8*22,[10 20]) % % See also: CPLofmeshgrid(X, Y), PLmeshgrid % |
VLedgeNormal(VL,ez)- returns the normal vector to vertex edge list |
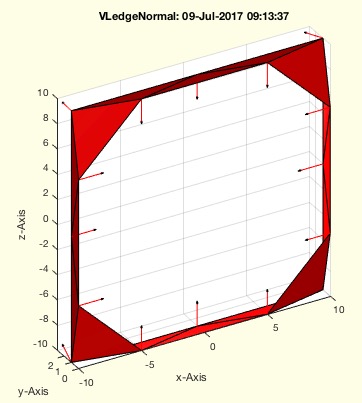 |
% VLedgeNormal(VL,ez) - returns the normal vector to vertex edge list % (by Tim Lueth, VLFL-Lib, 2017-JUL-09 as class: EDGE LISTS) % % It does not support nan separted vertex lists (CVL) yet. The normal is % NaN for the first point or the given ez. The normal is NaN for the % lastpoint. The normal is NaN for all straight points. In case of % switching normals; the orientation of the succeeding normal will be % fliped. (Status of: 2017-07-09) % % Introduced first in SolidGeometry 4.0 % % See also: VLFLfaceNormal, edgeNormal, CPLedgeNormal % % [NL,AL]=VLedgeNormal(VL,[ez]) % === INPUT PARAMETERS === % VL: Vertex list of succeeding vertices % ez: optional first normal vector; default is normal of facet [1 2 3] % === OUTPUT RESULTS ====== % NL: Normal vector; NaN if A(i)=0; % AL: area vector; if straight, A(i)=0; % % EXAMPLE: % VL=VLsample(12); VL=[VL;VL(1:2,:)]; VLedgeNormal(VL) % VLedgeNormal(PLhelix(10,10,4*pi)) % VLedgeNormal(VLsample(9)) % % % See also: VLFLfaceNormal, edgeNormal, CPLedgeNormal % |
PLmeshgrid(xx,yy)- simple function for a better understand of meshgrid |
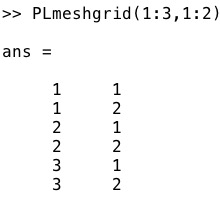 |
% PLmeshgrid(xx,yy) - simple fnctn for a better understand of meshgrid % (by Tim Lueth, VLFL-Lib, 2017-JUL-08 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.0 % % See also: VLmeshgrid, CPLofmeshgrid(X, Y) % % PL=PLmeshgrid(xx,yy) % === INPUT PARAMETERS === % xx: list of x values % yy: list of y values % === OUTPUT RESULTS ====== % PL: Point list of all mesh coordinates % % EXAMPLE: % PLmeshgrid(1:3,1:2) % PLmeshgrid([0 15 25 35 45 55 65],0:8:8*22) % % See also: VLmeshgrid, CPLofmeshgrid(X, Y) % |
SGgrowFS (SG,t)- grows the feature surfaces of a solid |
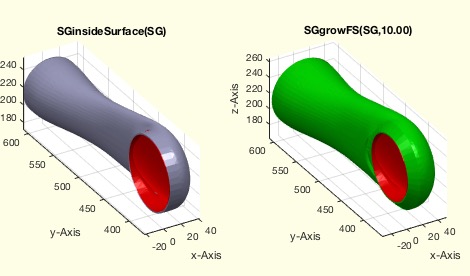 |
% SGgrowFS (SG,t) - grows the feature surfaces of a solid % (by Tim Lueth, VLFL-Lib, 2017-JUL-08 as class: SURFACES) % % The feature surfaces are calculated (default value is 1 rad/60 degree). % Afterwards it is analyzed wich facets show inside of the solid an which % show outside. Only inside or outside are processed here. Use SGgrow for % processing all. At the border between outside and inside, the vertices % that belong to both (inside, outside) stay unchanged. The vertices that % define the border of the new outside surfaces are not moved along the % vertex normal vector but along the normal vector of the border contour! % Attention: Be aware that concave surface cannot be grown without % self-penetration. (Status of: 2017-07-08) % % Introduced first in SolidGeometry 4.0 % % See also: SGgrowFS, SGgrow % % SGgrowFS(SG,[t]) % === INPUT PARAMETERS === % SG: Solid Geometry % t: Increase/Decrease Value along the vertex normal vector % % EXAMPLE: % load JACO_robot.mat % use loadweb if the file need to be aquired % SG=SGseparate(JC3,3) % SGgrowFS(SG,10) % % See also: SGgrowFS, SGgrow % |
clipboardrem(maxc)- removes comment characters from the clipboard |
 |
% clipboardrem(maxc) - removes comment characters from the clipboard % (by Tim Lueth, FileMaker, 2017-JUL-07 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.0 % % See also: clipboardadd % % C=clipboardrem([maxc]) % === INPUT PARAMETERS === % maxc: % === OUTPUT RESULTS ====== % C: % % See also: clipboardadd % |
clipboardadd(maxc)- adds comment characters from the clipboard |
 |
% clipboardadd(maxc) - adds comment characters from the clipboard % (by Tim Lueth, VLFL-Lib, 2017-JUL-07 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.0 % % See also: clipboardrem % % C=clipboardadd([maxc]) % === INPUT PARAMETERS === % maxc: % === OUTPUT RESULTS ====== % C: % % See also: clipboardrem % |
surfacesofSG(TR,alpha);- returns all OPEN surfaces that have a limited angle between their normal vectors |
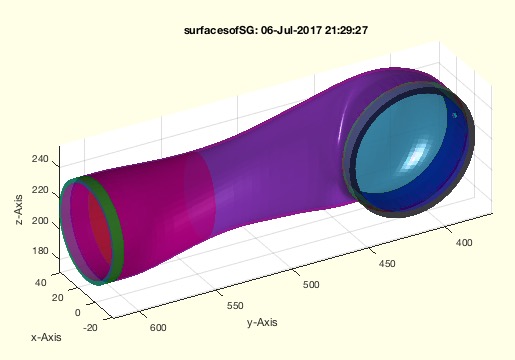 |
% surfacesofSG(TR,alpha); - returns all OPEN surfaces that have a limited angle between their normal vectors % (by Tim Lueth, VLFL-Lib, 2017-JUL-06 as class: SURFACES) % % This fnctn can take several seconds to classify all OPEN surfaces of a % solid by using TR3neighborsAngle and neighborsAngleSurface. % When called without output parameter; drawing the surfaces take the % most time. % SGsurfaces returns CLOSED surfaces (Status of: 2017-07-07) % % Introduced first in SolidGeometry 4.0 % % See also: neighborsAngleSurface, TR3neighborsAngle, SGsurfaces % % [FIL,k,FNL,NAL,NBL,Ai]=surfacesofSG(TR,[alpha]); % === INPUT PARAMETERS === % TR: Solid Geometry or Triangulation % alpha: maximum angle difference between two facets; default is 1 ~ 60 % degree % === OUTPUT RESULTS ====== % FIL: Index List for the Surface Indices % k: maximum value of FIL % FNL: Facet Normal List - TR3neighborsAngle % NAL: Neigbor Angle List - TR3neighborsAngle % NBL: Neigbor List - TR3neighborsAngle % Ai: Area of the indexed surfaces 1:k % % EXAMPLE: % load JACO_robot.mat % surfacesofSG(JC3); % % See also: neighborsAngleSurface, TR3neighborsAngle, SGsurfaces % |
LaserInit- Initializes the USB-Serial Port and Requests Data from the Leuze Scanner |
 |
% LaserInit - Initializes the USB-Serial Port and Requests Data from the Leuze Scanner % (by Tim Lueth & Sebastian Heininger, ROBOT-Lib, 2017-JUL-06) % % This is just an example how to use the Leuze Laser Scanner at the mac % computer. (Status of: 2017-07-06) % % Introduced first in SolidGeometry 4.0 % % See also: USBhelp % % LaserInit % % See also: USBhelp % |
SGinsideSurface(SG,fnum,wlim,ilim)- Checks the distance between the centers of the facets |
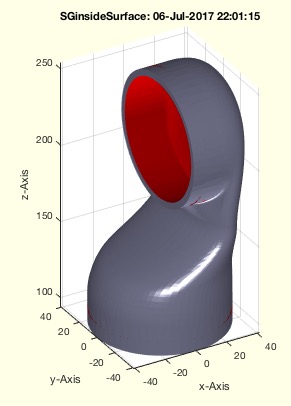 |
% SGinsideSurface(SG,fnum,wlim,ilim) - Checks the distance between the centers of the facets % (by Tim Lueth, VLFL-Lib, 2017-JUL-06 as class: EXPERIMENTS) % % The fnctns SGcheckfacedist and SGinsidesurface are very similar. Both % ray trace the normal vector of a facet and detect self-penetration of % other facets. While SGcheckfacedist looks backwards, SGinsideSurface % looks forward along the normal vector. The only problem is the extreme % time-consuming quadratic growing effort. % In SGcheckfacedist there is almost never a need to process the original % data. But for SGinsidesurface there is wish to process the original % data. There we use a heuristics to accelerate the algorithm. First we % analyze freeeform surfaces using surfacesofSG, the we analyze just for % each of those surfaces ONE surface to have an opponent. (Status of: % 2017-07-07) % % Introduced first in SolidGeometry 4.0 % % See also: SGcheckfacedist, SGinsidesurface, surfacesofSG % % [FIL,insFS]=SGinsideSurface(SG,[fnum,wlim,ilim]) % === INPUT PARAMETERS === % SG: Solid Geometry % fnum: reduce to face numbers; default is 3000; % wlim: warning limit; default is 0.7 mm % ilim: intended limit; distance that is considered as intended; default % is 0.1mm % === OUTPUT RESULTS ====== % FIL: Facet surface index list % insFS: inside index of feature surface % % EXAMPLE: % load JACO_robot.mat % SG=SGsurfaces(JC3,3) % SGinsideSurface(SG) % % See also: SGcheckfacedist, SGinsidesurface, surfacesofSG % |
diffangle(NL1,NL2,normfirst)- calculates the angle between to normal vector lists |
 |
% diffangle(NL1,NL2,normfirst) - calculates the angle between to normal vector lists % (by Tim Lueth, VLFL-Lib, 2017-JUL-06 as class: ANALYTICAL GEOMETRY) % % optimal for list processing. if normalization is required, the time is % about doubled (Status of: 2017-07-06) % % Introduced first in SolidGeometry 4.0 % % See also: TR3neighborsAngle % % AL=diffangle(NL1,NL2,[normfirst]) % === INPUT PARAMETERS === % NL1: normal vector lists 1 % NL2: normal vector lists 2 % normfirst: if true; VLnorm is sued to norm the vectors first; % === OUTPUT RESULTS ====== % AL: real(acos(dot(NL1(i,:),NL2(i,1)))) % % EXAMPLE: NL1=rand(10,3); NL2=rand(10,3); % % % See also: TR3neighborsAngle % |
SGcheckfacedist(SG,fnum,wlim,ilim)- Checks the distance between the centers of the facets |
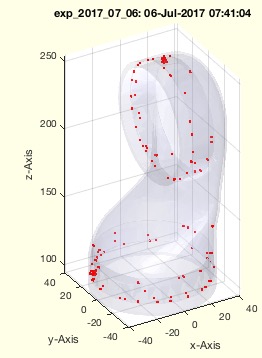 |
% SGcheckfacedist(SG,fnum,wlim,ilim) - Checks the distance between the centers of the facets % (by Tim Lueth, VLFL-Lib, 2017-JUL-06 as class: EXPERIMENTS) % % Important test procedure for shrinked models and imported geometries. % Attention: Some geometries consist of intended overlapping structures % Attention: Some geometries consist of open surfaces (Status of: % 2017-07-06) % % Introduced first in SolidGeometry 4.0 % % See also: exp_2017_07_06 % % [ml,cpl]=SGcheckfacedist(SG,[fnum,wlim,ilim]) % === INPUT PARAMETERS === % SG: Solid Geometry % fnum: reduce to face numbers; default is 3000; % wlim: warning limit; default is 0.7 mm % ilim: intended limit; distance that is considered as intended; default % is 0.1mm % === OUTPUT RESULTS ====== % ml: complete list of distances % cpl: complete list of cross points % % See also: exp_2017_07_06 % |
VLFLofSGT(SGN,N)- returns the VL and FL of the surface related to a fram |
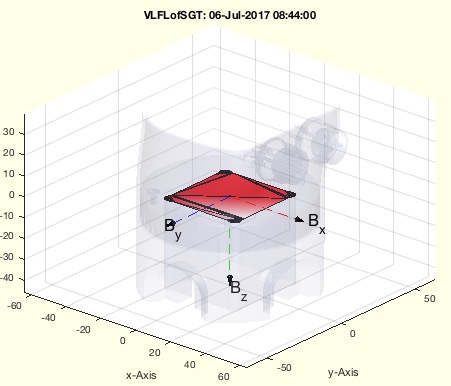 |
% VLFLofSGT(SGN,N) - returns the VL and FL of the surface related to a fram % (by Tim Lueth, VLFL-Lib, 2017-JUL-06 as class: SURFACES) % % Introduced first in SolidGeometry 4.0 % % See also: CVLofVLFL % % [VL,FL]=VLFLofSGT(SGN,N) % === INPUT PARAMETERS === % SGN: Solid with Frames % N: Name of Frames % === OUTPUT RESULTS ====== % VL: Vertex list; shortend % FL: FAcet list; shortend % % EXAMPLE: % loadweb JACO_robot.mat % VLFLofSGT(JC0,'B'); % % See also: CVLofVLFL % |
CVLofVLFL()- does the same as CVLfreeBoundaryVLFL |
 |
% CVLofVLFL() - does the same as CVLfreeBoundaryVLFL % (by Tim Lueth, VLFL-Lib, 2017-JUL-06 as class: SURFACES) % % ======================================================================= % OBSOLETE (2017-07-06) - USE FAMILY 'CVLfreeBoundaryVLFL' INSTEAD % ======================================================================= % % Introduced first in SolidGeometry 4.0 % % See also: [ CVLfreeBoundaryVLFL ] ; VLFLofSGT % % [CVL,TR]=CVLofVLFL([]) % === OUTPUT RESULTS ====== % CVL: % TR: % % See also: [ CVLfreeBoundaryVLFL ] ; VLFLofSGT % |
CVLofSGT(SGN,N)- returns the CVL of the surface that belongs to a Frame |
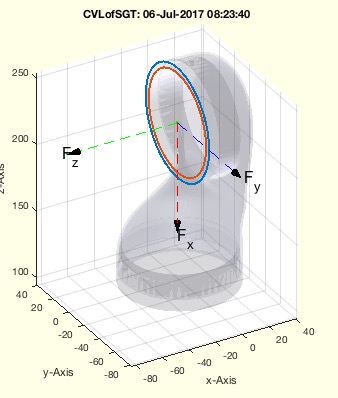 |
% CVLofSGT(SGN,N) - returns the CVL of the surface that belongs to a Frame % (by Tim Lueth, VLFL-Lib, 2017-JUL-06 as class: SURFACES) % % Introduced first in SolidGeometry 4.0 % % See also: VLFLofSGT % % CVL=CVLofSGT(SGN,N) % === INPUT PARAMETERS === % SGN: Solid Geometry with Frames % N: Frame name % === OUTPUT RESULTS ====== % CVL: Convtour Vertex List % % EXAMPLE: loadweb JACO_robot.mat % CVLofSGT(JC1,'F'); % % See also: VLFLofSGT % |
SGofsmbFullModelSimulation(SGi,Ti,tm,t)- returns a solid geometry for an arbitrary time value of a simulation |
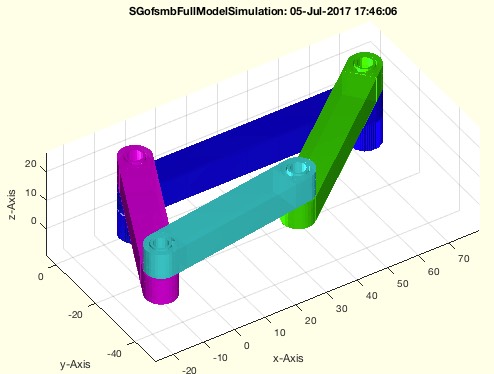 |
% SGofsmbFullModelSimulation(SGi,Ti,tm,t) - returns a solid geometry for an arbitrary time value of a simulation % (by Tim Lueth, VLFL-Lib, 2017-JUL-05 as class: SIMMECHANICS INTERFACE) % % This fnctn is an add on to smbFullModelSimulation (Status of: % 2017-07-05) % % Introduced first in SolidGeometry 4.0 % % See also: smbFullModelSimulation % % [SG,t]=SGofsmbFullModelSimulation(SGi,Ti,tm,t) % === INPUT PARAMETERS === % SGi: List of Solid Geometries, result of smbFullModelSimulation % Ti: List of HT Frames, result of smbFullModelSimulation % tm: List of time points result of smbFullModelSimulation % t: desired time % === OUTPUT RESULTS ====== % SG: Solid Geoemtry % t: Exact time of simulation % % EXAMPLE: % [~,BNi,SGi,Ti,tm]=smbFullModelSimulation(1); % SGofsmbFullModelSimulation(SGi,Ti,tm,0); % % See also: smbFullModelSimulation % |
SGgrabcad- Simply opens the WWW-page of grabcad.com in the system browser |
 |
% SGgrabcad - Simply opens the WWW-page of grabcad.com in the system browser % (by Tim Lueth, VLFL-Lib, 2017-JUL-05 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.0 % % See also: SG_DBconnectors.mat, SG_Patientknee.mat % % SGgrabcad % % See also: SG_DBconnectors.mat, SG_Patientknee.mat % |
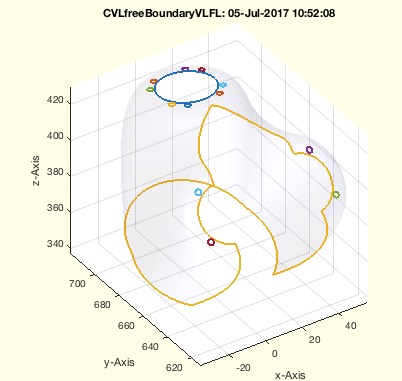
CVLfreeBoundaryVLFL(VL,FL)- returns the CVL of the free boundary |
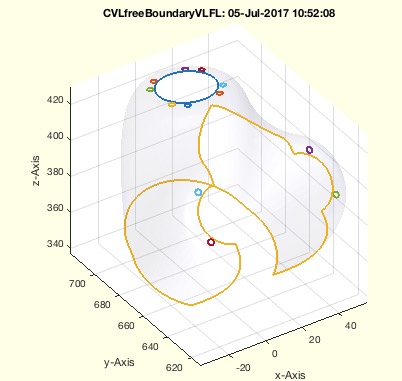 |
% CVLfreeBoundaryVLFL(VL,FL) - returns the CVL of the free boundary % (by Tim Lueth, VLFL-Lib, 2017-JUL-05 as class: SURFACES) % % Introduced first in SolidGeometry 4.0 % % See also: freeBoundary, neighborsAngleSurface % % [CVL,TR2]=CVLfreeBoundaryVLFL(VL,FL) % === INPUT PARAMETERS === % VL: Vertex List, or Solid Geometry, or triangulation % FL: Facet list, if VL is Vertex list % === OUTPUT RESULTS ====== % CVL: Closed vertex contour list % TR2: triangulation % % EXAMPLE: % loadweb JACO_robot.mat % SG=JC61; [NAL,NBL]=TR3neighborsAngle(SG); % fi=neighborsAngleSurface(NAL,NBL,1,22000); % CVLfreeBoundary(SG.VL,SG.FL(fi,:)) % % See also: freeBoundary, neighborsAngleSurface % |
ELunique(ELo)- returns a unique list of all edges |
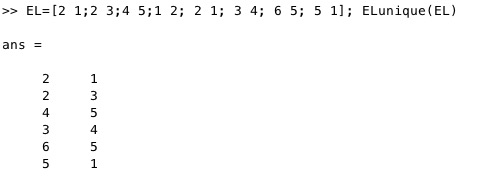 |
% ELunique(ELo) - returns a unique list of all edges % (by Tim Lueth, VLFL-Lib, 2017-JUL-05 as class: EDGE LISTS) % % Makes sure that no edge is used twice! % More or less the same as ELuniqueofFL but will not change the ordner % and in case of doubles the direction of the first used edges is not % changed. (Status of: 2017-07-05) % % Introduced first in SolidGeometry 4.0 % % See also: ELuniqueofFL % % EL=ELunique(ELo) % === INPUT PARAMETERS === % ELo: Edge List or Facet List % === OUTPUT RESULTS ====== % EL: Edge list sorted by first vertex index % % EXAMPLE: % EL=[2 1;2 3;4 5;1 2; 2 1; 3 4; 6 5; 5 1]; ELunique(EL) % % See also: ELuniqueofFL % |
graphofEL(EL,n)- creates an undirected graph model from an edge list |
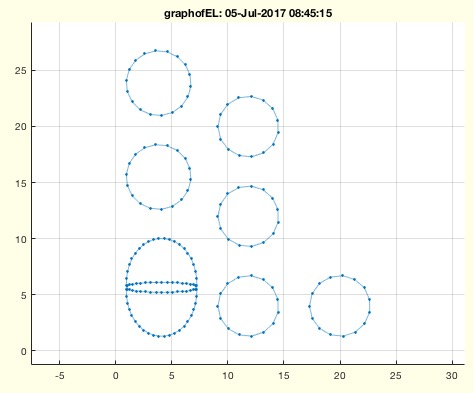 |
% graphofEL(EL,n) - creates an undirected graph model from an edge list % (by Tim Lueth, VLFL-Lib, 2017-JUL-05 as class: EDGE LISTS) % % This is the first fnctn to analyze surface models using graph theory. % It is extremely helpful to analyze the structures by this abstraction % level. % MATLAB supports since 2015b % undirected "graphs" and % directed "digraphs" (Status of: 2017-07-05) % % Introduced first in SolidGeometry 4.0 % % See also: featureEdges % % G=graphofEL(EL,[n]) % === INPUT PARAMETERS === % EL: Edge list; must have unique entries! % n: optional number of vertices % === OUTPUT RESULTS ====== % G: MATLAB's Graph struct using Edges and Nodes % % EXAMPLE: % EL=featureEdges(TR3ofSG(SGsample(25)),1) % graphofEL(EL) % graphofEL(featureEdges(TR3ofSG(SGsample(3)),1)) % % See also: featureEdges % |
neighborsAngleSurface(NAL,NBL,alpha,fi)- returns connected facets with respect to a feature angle |
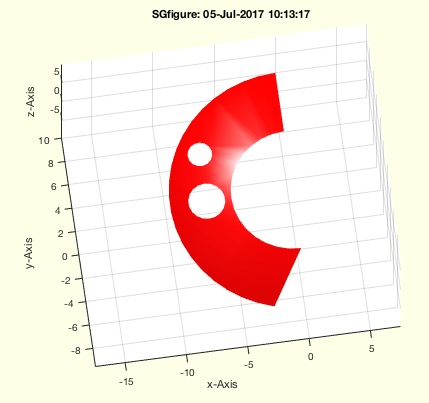 |
% neighborsAngleSurface(NAL,NBL,alpha,fi) - returns connected facets with respect to a feature angle % (by Tim Lueth, VLFL-Lib, 2017-JUL-05 as class: SURFACES) % % The required parameter NAL,NBL are calculated using TR3neighborsAngle. % Since TR3neighborsAngle can be slow, the fnctns are separated to % accelerate the repeatet use of neighborsAngleSurface. % % (Status of: 2017-07-05) % % Introduced first in SolidGeometry 4.0 % % See also: TR3neighborsAngle % % [fa,FCL]=neighborsAngleSurface(NAL,NBL,alpha,fi) % === INPUT PARAMETERS === % NAL: =TR3neighborsAngle(TR3) % NBL: =neighbors(TR3), also delivered by [NAL,NBL]=TR3neighborsAngle(TR3) % alpha: feature angle % fi: starting facet index (can be several) % === OUTPUT RESULTS ====== % fa: facet index with respect to NAL,NBL of (TR3) % FCL: Facet connection list; optional % % EXAMPLE: % SG=SGsample(25); % [NAL,NBL]=TR3neighborsAngle(SG); fi=neighborsAngleSurface(NAL,NBL,1,22); % VLFLplot(SG.VL,SG.FL(fi,:)) % % See also: TR3neighborsAngle % |
TR3featureEdges(TR3,alpha)- returns feature edge List plus edge attached facets |
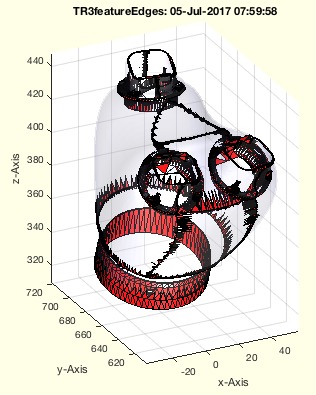 |
% TR3featureEdges(TR3,alpha) - returns feature edge List plus edge attached facets % (by Tim Lueth, VLFL-Lib, 2017-JUL-05 as class: SURFACES) % % Auxiliary fnctn as starting point: % Simply calls featureEdges. It is not using edgeAttachments but an own % solution % (Status of: 2017-07-05) % % Introduced first in SolidGeometry 4.0 % % [EL,Fi]=TR3featureEdges(TR3,alpha) % === INPUT PARAMETERS === % TR3: Triangulation % alpha: feature edge angle % === OUTPUT RESULTS ====== % EL: Feature Edge List % Fi: Index of TR3.ConnectivityList % % EXAMPLE: % TR3featureEdges(SGsample(25),1) % |
TR3neighborsAngle(TR3)- returns the angle difference between a facet an its neigbors |
 |
% TR3neighborsAngle(TR3) - returns the angle difference between a facet an its neigbors % (by Tim Lueth, Video-Lib, 2017-JUL-04 as class: SURFACES) % % Calculated the difference angle between a surface and its neighbor % surfaces. % Typically used in combination with/to create the input for % fnctn neighborsAngleSurface (Status of: 2017-07-05) % % Introduced first in SolidGeometry 4.0 % % See also: neighborsAngleSurface, diffangle % % [NAL,NBL,FNL]=TR3neighborsAngle(TR3) % === INPUT PARAMETERS === % TR3: Triangulation or SG % === OUTPUT RESULTS ====== % NAL: Facet Normal Angle List wrt to NBL % NBL: Neighbor List = neighbors(TR3) % FNL: Facet normal List = faceNormal(TR3) % % See also: neighborsAngleSurface, diffangle % |
loadweb (mname,overwr,urlp)- loads mat files from an web url |
 |
% loadweb (mname,overwr,urlp) - loads mat files from an web url % (by Tim Lueth, VLFL-Lib, 2017-JUL-03 as class: AUXILIARY PROCEDURES) % % This fnctn reduces the size of the SG-Lib Toolbox since the '.mat' % files and the directories can be downloaded once into the user % directory. % if parameter overwr=false; the filename will be "downloaded_mname" % if parameter overwr=true; the filename will be "mname" % Try: % 'AArrufo_surf.mat' (3.6 MByte) % 'JACO_robot.mat' (6.1 MByte) % 'AIM_SGrobot.mat' (0.1 MByte) % 'AIM_Patientmodel.mat' ( 5MByte) % 'ModulKegelradwelle_1.mat' (0.2 MByte) (Status of: 2017-07-03) % % Introduced first in SolidGeometry 4.0 % % See also: load, webread % % loadweb(mname,[overwr,urlp]) % === INPUT PARAMETERS === % mname: name and extension of the file % overwr: true=overwrite; default is false. % urlp: web path; default is % 'https://www.mec.ed.tum.de/fileadmin/w00cbp/mimed/Matlab_Toolboxes/' % % EXAMPLE: % loadweb('JACO_robot.mat') % loads the downloaded file % loadweb('JACO_robot.mat',true) % replaces the original file by the % downloaded file % % See also: load, webread % |