Simulation and Numerical Methods
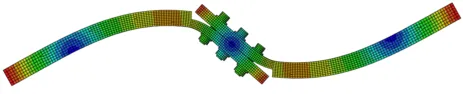
A central research goal at the Chair of Applied Mechanics is the reduction of computation time for such simulations. We develop algorithms that help exploit the parallel structure of today’s computer architectures, i.e., algorithms that can be executed on multiple cores or even on high-performance computers. In addition, we develop model reduction methods that decrease the computational effort required to obtain simulation results by approximating large models using mathematical techniques.
Experimental Dynamics
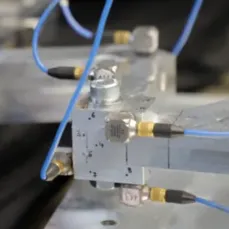
The focus of Experimental Dynamics is on analyzing mechanical properties using test rigs. The wide range of applications results in a broad spectrum of scientific and technological aspects: Which properties are of interest—durability, vibration, or aging effects? Is the focus on linear vibrations, nonlinear joints, multiphysical magnetic bearings, humanoid robots, or even human cells? The overall goal also draws attention to technical questions, such as the methods and measuring devices used for analysis, with specially designed sensors, cameras, or laser vibrometers among the available tools. These are questions and areas that significantly influence our research.
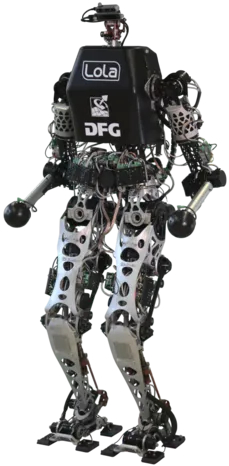
Robotics
The foundation of our research is basic research on walking robots like LOLA, a fully self-developed humanoid. The intelligent combination of lightweight components and efficient software modules enables LOLA to navigate not only under well-defined laboratory conditions but also in unstructured, dynamic environments. With LOLA, we develop and evaluate new approaches for real-time step planning and gait control. Promising methods are transferred to other platforms and new areas, such as vibration compensation for industrial robots. In addition to industrial applications, we study human gait and use this information to improve LOLA’s planning as well as to develop new simulation methods that can be applied to enhance prosthesis design.