Aktuelle Projekte
Simulation und Numerik
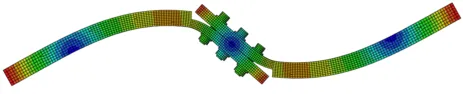
Ein zentrales Forschungsziel am Lehrstuhl für Angewandte Mechanik ist die Reduzierung der Rechenzeit für solche Simulationen. Wir entwickeln Algorithmen, die dabei helfen, die parallele Struktur heutiger Computerarchitekturen auszunutzen, d.h. Algorithmen, die auf mehreren Kernen oder sogar auf Hochleistungsrechnern ausgeführt werden können. Darüber hinaus entwickeln wir Modellreduktionsmethoden, die den Rechenaufwand zur Gewinnung von Simulationsergebnissen verringern, indem große Modelle mithilfe mathematischer Verfahren approximiert werden.
Experimentelle Dynamik
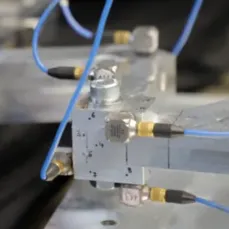
Der Schwerpunkt der Experimentellen Dynamik liegt auf der Analyse mechanischer Eigenschaften anhand von Prüfständen. Aus der Vielzahl der Anwendungen ergibt sich ein breites Spektrum an wissenschaftlichen und technologischen Aspekten: Welche Eigenschaften sind von Interesse - Haltbarkeit, Schwingung oder Alterungseffekte? Liegt der Fokus auf linearen Schwingungen, nichtlinearen Gelenken, multiphysikalischen Magnetlagern, humanoiden Robotern oder gar menschlichen Zellen? Das Gesamtziel lenkt den Blick auch auf technische Fragen, wie bspw. den zur Analyse verwendeten Methoden und Messgeräten, bei denen speziell angefertigte Sensoren, Kameras oder Laser-Vibrometer zu den verfügbaren Werkzeugen gehören. Fragen und Bereiche, die unsere Forschung maßgeblich beeinflussen.
Robotik
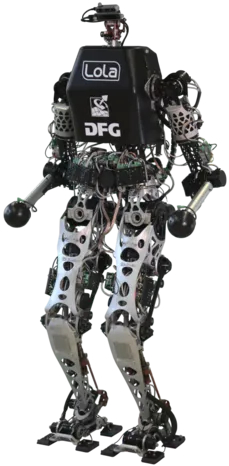
Ursprung unserer Untersuchungen bildet die Grundlagenforschung an Laufrobotern wie LOLA, ein vollständig eigenständig entwickelter Humanoid. Die intelligente Kombination von Leichtbaukomponenten und effizienten Software-Modulen ermöglicht es LOLA, nicht nur unter klar definierten Laborbedingungen, sondern auch in unstrukturierten, dynamischen Umgebungen zu navigieren. An LOLA entwickeln und evaluieren wir neue Ansätze zur echtzeitfähigen Schrittplanung und Laufregelung. Erfolgversprechende Methoden werden auf andere Plattformen und in neue Bereiche übertragen, z. B. zur Schwingungskompensation von Industrierobotern. Neben der industriellen Anwendung untersuchen wir den menschlichen Gang und verwenden diese Informationen zur Verbesserung der Planung von LOLA sowie für die Entwicklung neuer Simulationsmethoden, welche für ein verbessertes Prothesen-Design herangezogen werden können.