Humanoider Roboter LOLA
Die im JOHNNIE Projekt gewonnenen Erfahrungen legten nahe, dass eine wesentliche Steigerung der Laufgeschwindigkeit, Geschicklichkeit und Autonomie des Systems nur durch eine Neukonstruktion unter Einsatz modernster Technologien möglich ist. Die Überlegungen mündeten in den DFG Paketantrag “Natur und Technik intelligenten Laufens”, in dessen Rahmen der humanoide Laufroboter LOLA entwickelt wurde.
Ziele
Ziel des Projekts war es, dem menschlichen Gangbild und der menschlichen Ganggeschwindigkeit noch näher zu kommen und gleichzeitig auch die Autonomie des Systems zu erhöhen. Die Autonomie des Roboters sollte durch eine engere Integration von visueller Wahrnehmung und Laufregelung erhöht werden. Das Sichtsystem wurde in einem Kooperationsprojekt am Institut für Technik Autonomer Systeme der Universität der Bundeswehr in München entwickelt.
Erhöhte Autonomie erfordert auch eine Regelung die robuster und flexibler ist und dabei die Stabilität des Roboters über einen möglichst großen Bereich an Laufsituationen sicherstellt. Obwohl der Schwerpunkt der Forschung auf der Autonomie im Sinne einer Unabhängigkeit von menschlichen Eingriffen liegt, werden wir zu einem späteren Zeitpunkt eine Energieversorgung in den Roboter integrieren. Dadurch wird der Roboter im engeren Sinne autonom, wodurch zusätzliche, interessante Experimente ermöglicht werden.

Systembeschreibung
Das schnelle zweibeinige Laufen stellt sehr hohe Anforderungen an einen humanoiden Roboter und kann nur durch eine sorgfältige Auslegung des mechatronischen Gesamtsystems erreicht werden.
Der humanoide Roboter LOLA ist 180 cm groß und wiegt zirka 60 kg. Die Proportionen entsprechen den anthropometrischen Daten eines durchschnittlichen Erwachsenen. Abbildung 1 zeigt eine Fotografie des Roboters. LOLAs mechanischer Aufbau zeichnet sich aus durch die redundante kinematische Struktur, den konsequenten Leichtbau und die modularen, multisensorischen Gelenkantriebe auf Basis bürstenloser Servomotoren. Besondere Sorgfalt wurde auf die Massenverteilung in den Beinen gelegt, um eine hohe Dynamik des Gesamtsystems zu erreichen.
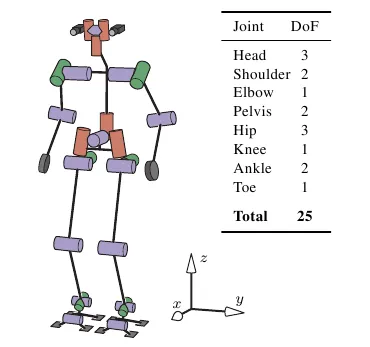
Die Entwicklung einer kinematischen Konfiguration, die einen natürlichen, stabilen und schnellen Gang ermöglicht, ist einer der zentralen konzeptionellen Fragestellungen. Simulationen und Experimente haben gezeigt, dass sich mit zusätzlichen, redundanten Freiheitsgraden natürlichere und flexiblere Gangmuster realisieren lassen und die Fähigkeiten des Roboters generell erweitert werden können. Abbildung 2 zeigt die kinematische Konfiguration mit 25 angetriebenen Freiheitsgraden: Die Beine verfügen über jeweils sieben, das Beckensegment über zwei und die Arme jeweils über drei Gelenke. Ein Stereo-Kamerakopf mit drei Freiheitsgraden ist derzeit in Entwicklung.
Weitere Design-Parameter, die die Dynamik des Gesamtsystems verbessern, sind (1) eine ausreichende Struktursteifigkeit, (2) ein möglichst hoher Gesamtschwerpunkt und (3) minimale Massenträgheitsmomente der Beinsegmente. Es wurden neue Antriebsmechanismen für die Knie- und Sprunggelenke entwickelt, die es ermöglichen schwere Komponenten (z.B. Motoren) nahe der Drehachse des Hüftgelenks zu platzieren.
Das Gesamtgewicht und die Massenverteilung bestimmen maßgeblich die Dynamik des Gesamtsystems, weshalb ein extremer Leichtbau der mechanischen Struktur von großer Bedeutung ist. Größere Strukturbauteile wurden im Prototypen-Feingussverfahren aus Aluminium hergestellt. Konzeptionelle Vorentwürfe wurden mit einem Werkzeug zur Topologieoptimierung erstellt, um die engen Vorgaben hinsichtlich Steifigkeit und Gewicht zu erfüllen. Die konkurrierenden Forderungen nach minimalem Gewicht und möglichst hoher Antriebsleistung mussten so abgewogen werden, dass die erforderlichen Drehmomente und Geschwindigkeiten mit ausreichender Bandbreite erreicht werden können. Die nötige Steigerung der Antriebsleistung wird ohne wesentlichen Gewichtszuwachs erreicht, indem ausschließlich modernste Motor- und Getriebetechnik mit hoher Leistungsdichte, sowie hochintegrierte Sensorik eingesetzt werden.
Die Regelung des Roboters erfolgt auf einem Onboard-PC und mehreren dezentralen Steuermodulen, auf die hardware-nahe Aufgaben ausgelagert sind. Die dezentralen Steuerungskomponenten erhöhen die Leistungsfähigkeit aus technologischer Sicht: ähnlich hierarchischen Systemen in der Natur werden Sensordaten dezentral verarbeitet und nur relevante Daten an die überlagerte Steuerungsebene weitergegeben. Zusammen mit den Gelenkantrieben und den Sensoren bildet der Onboard-PC ein „intelligentes“ Sensor-Aktor-Netzwerk. Trajektorienplanung und stabilisierende Laufregelung laufen vollständig auf dem Onboard-Rechnersystem. Ein externer PC dient lediglich dazu, den Systemzustand zu überwachen und den Roboter mittels einfacher Befehle zu steuern, falls das Sichtsystem nicht aktiv ist. Aufgrund der hohen erforderlichen Rechenleistung ist die Bildverarbeitung auf ein externes PC-Cluster ausgelagert.
Bahnplanung und Regelung
Schnelleres Laufen erfordert auch eine verbesserte Trajektorienplanung und stabilisierende Laufregelung. Die Planung der Referenztrajektorien wird durch Berücksichtigung der nächsten drei Schritte sowie ein genaueres Modell des Roboters verbessert. Es wird ein neuartiges Verfahren zur Planung der Kontaktkraft- und Schwerpunktstrajektorien eingesetzt. Das Verfahren beruht auf restringierter Quadratischer Optimierung und Spline Kollokation und ermöglicht eine Planung stabiler Gangmuster in Echtzeit.
Die Online Bahnplanung wird mit einer stabilisierenden Laufregelung kombiniert, die auf JOHNNIEs Impedanzregelung basiert. Das System verbindet eine Stabilisierung der globalen Dynamik durch Manipulation der Kontaktkräfte mit einer hybriden Positions-/Kraftregelung im Arbeitsraum. Kinematische Redundanzen werden innerhalb der Arbeitsraumregelung aufgelöst, wodurch ein einfacher und effektiver Einsatz der redundanten Freiheitsgrade möglich wird.
Das Planungs- und Regelungssystem ist in C/C++ als Gruppe kooperierender Prozesse implementiert, die auf JOHNNIEs oder LOLAs Onboard-PC unter dem Echtzeitbetriebssystem QNX Neutrino laufen.
Um die Dynamik der Roboter zu analysieren und neue Regelungsstrategien entwickeln und bewerten zu können, wurde ein Mehrkörperprogramm zur Simulation zweibeiniger Laufroboter entwickelt. Das Programm implementiert mehrere Modelle der Roboter LOLA und JOHNNIE und stellt Schnittstellen zu den Reglern bereit, die Quellcode kompatibel zu denen des Echtzeitsystems sind. Ein OpenGL basierter Betrachter zur Analyse der Simulations- und Planungsergebnisse vervollständigt das System.
Abbildung 3 zeigt die simulierte Laufbewegung von LOLA sowie die geplanten Aufstandspolygone und Trajektorien der nächsten Schritte.

Vorstellung auf der Hannover Messe 2010
Im Experiment konnten wir bisher eine Laufgeschwindigkeit von 3.34 km/h zeigen.
Gemeinsam mit dem Institut für Technik Autonomer Systeme wurde an einer autonomen, sichtgeführten Navigation gearbeitet. Auf der Hannover Messe 2010 konnten öffentlich die Fähigkeiten zur Navigation in unbekannter Umgebung gezeigt werden.
Es wurde auch daran gearbeitet, die Robustheit des Systems gegen unbekannte Hindernisse zu erhöhen. Derzeit kann der Roboter über ca. 4cm hohe Hindernisse gehen.
Danksagung
Dieses Projekt wird finanziert von der Deutschen Forschungsgemeinschaft (DFG) im Rahmen des Paketantrags „Natur und Technik intelligenten Laufens“ (UL 105/29, UL 105-34/1 und UL 105/36-1).
Wir danken den folgenden Firmen für ihre freundliche Unterstützung:
Links
Frequently asked questions about biped robots (Dr. Kajita, AIST)
AIST HRP-2 Humanoid Robotics Group
AIST Digital Human Research Center
Waseda University/Takanishi Lab
Publicly Available Software
- HoLola: Holographic Data Visualization for Lola
- lepp3: LOLA Environment Perception Package v3: understanding the environment sensed by a Kinect-like sensor
- lepp2: LOLA Environment Perception Package v3: understanding the environment sensed by a Kinect-like sensor
- LolAR: Augmented-Reality Visualization for Lola
- lolaCAT: AM-Robotics Hardware-Layer Code
- ARVisualizer: Awesome Robot Visualizer